 手機版
手機版 化工儀器網手機版
化工儀器網手機版
 化工儀器網小程序
化工儀器網小程序
 官方微信
官方微信 公眾號:chem17
公眾號:chem17
 掃碼關注視頻號
掃碼關注視頻號












西門子CPU中央控制單元6ES7211-0AA23-0XB0
SINAMICS DC MASTER 是 SINAMICS 系列的新成員,將許多以交流技術而*的 SINAMICS 工具和組件用在了直流技術方面。
作為可擴縮的驅動器系統,SINAMICS DC MASTER 系列變頻器在應對基本應用和要求苛刻的應用方面都表現出色。直流變頻器配備了進行標準的閉環控制的標準的控制裝置(標準 CUD)。使用將標準 CUD 和高級 CUD 組合在一起的選件可以處理在計算性能和接口數量要求更高的應用。
SINAMICS DC MASTER 系列直流變頻器把開環和閉環控制以及電源部分結合在了一部設備上。由于具有緊湊而節省空間的外形設計而與眾不同。
AOP30 高級操作面板和 BOP20 基本操作面板可以用于試運行和本地運行。
CUD 的接口和數字輸入/輸出的數量可以使用附加模塊補充 - 例如 TM15 和 TM31 端子模塊。
直流驅動系統的組件以及這些組件如何邏輯互連見“直流驅動器的系統組件”-“概述”中的框圖。該部分還在“工程”一節下提供了流程圖,為選擇和確定所需的組件提供支持。
使用SINAMICS DC MASTER 系列豐富的產品,所需的培訓時間更少、成本更低、產品使用了最大數量的相同部件。
標準和無縫系列的SINAMICS DC MASTER 裝置可以處理極寬范圍的電流和電壓。該系列設備設計用于連接三相線路供電。此外,該設備還可以連接高額定直流 125A 的單相線路供電。
功能和性能方面具有靈活的擴展能力。
產品豐富,有許多選件可以讓直流轉換器優化的滿足客戶需求 - 無論是在技術上還是經濟上。不同的客戶需求,包括接口的類型和數量以及計算性能和速度都可以通過選擇標準 CUD、高級 CUD 或者組合使用來準確滿足。
由于能夠快速簡單的更換組件,提高了工廠和系統的可用性。
可更換組件的設計使它們能夠實現快速簡單的更換。可以隨時檢查現有的備件,設備的序列號。
使用帶有圖形化 LCD 和純文本顯示屏的 AOP30 高級操作面板上的交互菜單可以方便的進行調試和參數化,還可以使用STARTER 調試工具進行獲得 PC 支持(見“工具和工程設計”)。
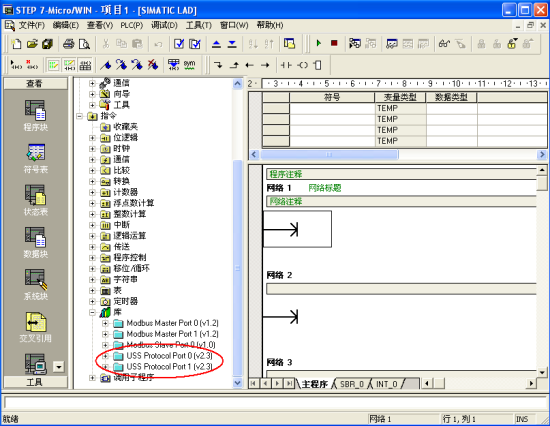
在使用MicroWin software 創建項目之前,確認USS庫文件已經安裝:
3、創建一個例程:
3.1 設置通訊接口
本例程使用PC/PPI電纜。

3.2 建立PC和PLC之間的連接
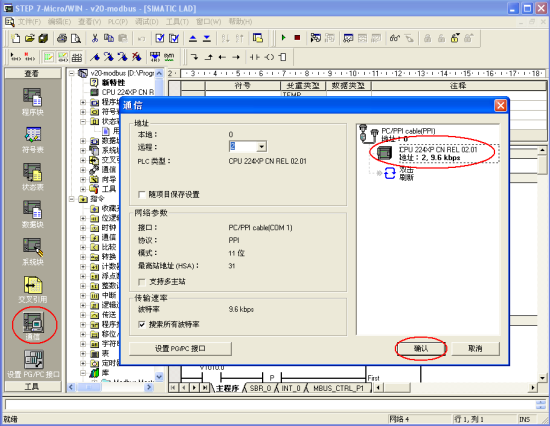
“雙擊刷新”搜索到PLC后,點擊”確認”。
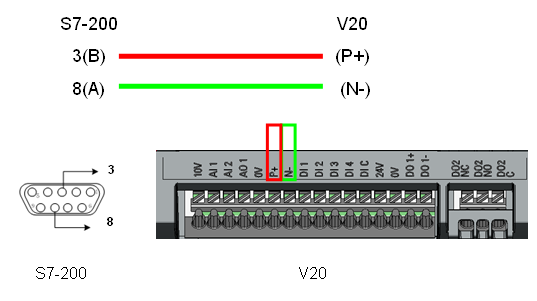
3.3 用電纜將S7-200 Port 0端口與V20的RS485接口相連(注意端口連接規則:V20的
P+對3、N-對8),如下圖所示:
3.4 變頻器參數設置:
V20 可以通過選擇連接宏Cn010實現USS控制,也可以通過直接更改變頻器參數的方法來實現。參數設置如下表所示:
表一:
| 參數 | 描述 | Cn010默認值 | 實際設置 | 備注 |
| P0700[0] | 選擇命令源 | 5 | 5 | RS485為命令源 |
| P1000[0] | 選擇頻率 | 5 | 5 | RS485為速度設定值 |
| P2023 | RS485協議選擇 | 1 | 1 | USS協議 |
| P2010[0] | USS/MODBUS波特率 | 8 | 6 | 波特率為9600bps |
| P2011[0] | USS地址 | 1 | 3 | 變頻器的USS地址 |
| P2012[0] | USS PZD長度 | 2 | 2 | PZD部分的字數 |
| P2013[0] | USS PKW長度 | 127 | 127 | PKW部分字數可變 |
| P2014[0] | USS/MODBUS報文間斷時間 | 500 | 0 | 接收數據時間 |
3.5 使用USS協議的初始化模塊初始化S7-200的PORT0端口:
EN使能:每次改變通訊狀態都應該執行一次初始化指令。所以EN信號應該通過邊沿檢測元件脈沖激活。
Mode:用這個USS輸入值選擇通訊協議。
1:為端口0USS協議,并啟用該協議。
0:為端口0PPI協議,并禁止USS協議。
Baud: 波特率:9600,19200…115200。
Active:激活驅動地址。
Done:當USS_INIT 指令執行完成后,Done=1。
Error:指令執行的結果,如果有錯誤,顯示錯誤代碼。
Active:激活驅動地址舉例:
3.6 使用USS——CTRL模塊來控制USS地址為3的變頻器,為了運行變頻器需要按照表一設置參數:
狀態表:
功能塊定義:
EN:通常情況總是激活。
RUN:指示驅動為啟用(1),或禁止(0)。
OFF2:允許V20自由停車。
OFF3:允許V20快速停止。
F _ACK:V2*復位。
DIR:V20轉動方向(0:逆時針;1:順時針)。
Drive:V20地址 0-31。
Speed:速度給定值,以全速的百分比給出 (-200.0~~200.0%,負值時,V20反向)。
Resp_R:輪詢V20,掃描時=1,并更新下面值。
Error:錯誤字節,參見表:USS指令執行錯誤。
Status:V20返回狀態值。
Speed:V20速度,(-200.0~~200.0%)。
Run_EN:V20運行狀態(1:運行;0:停止)。
D_DIR:V20轉動方向(0:逆時針;1:順時針)
Inhibit:V20禁止位狀態。 (0:啟用;1:禁止)。要清除禁止位,必須將Fault清零,
RUN,OFF2, OFF3輸入也要清零。
Fault:指示故障狀態。根據V2*表確認故障。故障排除后,置位F _ACK使Fault
清零。


免責聲明
- 凡本網注明“來源:化工儀器網”的所有作品,均為浙江興旺寶明通網絡有限公司-化工儀器網合法擁有版權或有權使用的作品,未經本網授權不得轉載、摘編或利用其它方式使用上述作品。已經本網授權使用作品的,應在授權范圍內使用,并注明“來源:化工儀器網”。違反上述聲明者,本網將追究其相關法律責任。
- 本網轉載并注明自其他來源(非化工儀器網)的作品,目的在于傳遞更多信息,并不代表本網贊同其觀點和對其真實性負責,不承擔此類作品侵權行為的直接責任及連帶責任。其他媒體、網站或個人從本網轉載時,必須保留本網注明的作品第一來源,并自負版權等法律責任。
- 如涉及作品內容、版權等問題,請在作品發表之日起一周內與本網聯系,否則視為放棄相關權利。



 采購中心
采購中心