 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網










| 產地類別 | 進口 | 應用領域 | 化工,電子/電池 |
|---|---|---|---|
| 產地 | 德國 | 品牌 | 西門子 |
針對PID相關參數,可以參考以下例子進行設定,使PID功能與斜坡時間P1120,P1121同時有效。
P1070=2294
P1120=10(斜坡上升時間,根據實際情況設定)
P1121=10(斜坡下降時間,根據實際情況設定)
P2200=0
P2253=2890(PID目標值給定通道,根據實際情況設定)
 |
| 參考價 | 面議 |
更新時間:2022-02-24 11:41:25瀏覽次數:464
聯系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
 |
|
 |
西門子MM440變頻器6SE6440-2UD17-5AA1
三組參數切換功能。控制功能: 線性v/f控制,平方v/f控制,可編程多點設定v/f控制,磁通電流控制免測速矢量控制,閉環矢量控制,閉環轉矩控制,節能控制模式;
標準參數結構,標準調試軟件;
數字量輸入6個,模擬量輸入2個,模擬量輸出2個,繼電器輸出3個;
獨立I/O端子板,方便維護;
采用BiCo技術,實現I/O端口自由連接;
SINAMICS G120C 變頻器包含三個不同的尺寸功率范圍從0.55kW到18.5kW。為了提高能效,變頻器集成了矢量控制實現能量的優化利用并自動降低了磁通。該系列的變頻器是全集成自動化的組成部分,并且可選PROFIBUS, Modbus RTU,CAN以及USS 等通訊接口。
INAMICS G120C是專門為滿足OEM用戶對于高性價比和節省空間的要求而設計的變頻器,同時它還具有操作簡單和功能豐富的特點。這個系列的變頻器與同類相比相同的功率具有更小的尺寸,并且它安裝快速,調試簡便,以及它友好的用戶接線方式和簡單的調試工具都使它與眾不同。
集成眾多功能:安全功能(STO,可通過端子或PROFIsafe激活),多種可選的通用的現場總線接口,以及用于參數拷貝的存儲卡槽。
使用中常常遇到因個別參數設置不當,導致變頻器不能正常工作的現象。
控制方式:即速度控制、轉距控制、PID控制或其他方式。采取控制方式后,一般要根據控制精度,需要進行靜態或動態辨識。
*低運行頻率:即電機運行的*小轉速,電機在低轉速下運行時,其散熱性能很差,電機長時間運行在低轉速下,會導致電機燒毀。而且低速時,其電纜中的電流也會增大,也會導致電纜發熱。
西門子MM440變頻器6SE6440-2UD17-5AA1
組態工具 "S7 Technology" 和"SIMOTION SCOUT" 都帶有 "STARTER" 軟件.
因此, 是不能再獨立安裝非集成版本的 "STARTER"來要設置"MICROMASTER" 和"SINAMICS" 產品系列的驅動設備; 比如, 在標準S7 CPU上操作這些驅動設備.
下面說明了在組態工具 "S7 Technology" 和"SIMOTION SCOUT" 集成的 "STARTER"中如何設置"MICROMASTER" 和"SINAMICS" 產品系列的驅動設備.
| No. | 步驟 |
| 1 | 建立 STEP 7 項目:
|
MM4變頻器的*高輸出頻率,除了與參數P1082(*高頻率)有關外,還與其他條件有關。
當PID自整定功能被激活時(P2350=1,2,3,4),BOP面板會顯示“A0936"報警,報警與參數P2350交替閃爍,此 時變頻器在很低的頻率下運行,整定會花費幾分鐘的時間。整定結束后,報警將自動消失,變頻器開始正常運行。
如果采用非矢量控制方式(P1300≤19),則*高輸出頻率僅受參數P1802的限制:
即,fmax = P1082
如果采用矢量控制方式(P1300≥20),則*高輸出頻率為以下限制條件中的*小值:
| 限制條件 | 含義 |
| P1082 | *高頻率 |
| 200 | 矢量控制方式的*高輸出頻率 |
| P0310*5 | 5倍的電機額定頻率 |
即,fmax = (P1082,200,5*P310)min
注:載波脈沖頻率P1800,會隨著對參數P1082和P0310的修改而自動更改,以滿足輸出頻率對P1800的要求,因此不需要考慮P1800對*高輸出頻率的限制。
MM440,MM430,G120系列變頻器的PID功能有效時,在通常設定下,斜坡時間P1120,P1121的設置是無效的。這樣,如果PI參數設定不當,系統響應過快,變頻器運行時就容易出現F0001過流,F0002過壓等故障;或者為了避免這些故障,降低系統響應,造成系統響應過慢,不能滿足工藝要求。
針對PID相關參數,可以參考以下例子進行設定,使PID功能與斜坡時間P1120,P1121同時有效。
P1070=2294
P1120=10(斜坡上升時間,根據實際情況設定)
P1121=10(斜坡下降時間,根據實際情況設定)
P2200=0
P2253=2890(PID目標值給定通道,根據實際情況設定)
P2264=755.0(反饋通道,根據實際情況設定)
P2280=3(比例增益,根據實際情況設定)
P2285=5(積分時間,根據實際情況設定)
P2890=50(PID目標值給定,根據實際情況設定)
以上參數在MM430 V2.02,MM440 V2.09,G120 V3.0驗證通過。
MM4變頻器在現場使用中,有時會•出現報警A911或者A502,檢查進線電壓和直流母線電壓均正常。造成報警的原因分析如下:
MM4變頻器在運行時會檢測直流母線的電壓值,當直流母線過高或者過低時,變頻器會產生相應的報警或故障代碼。如圖1所示:
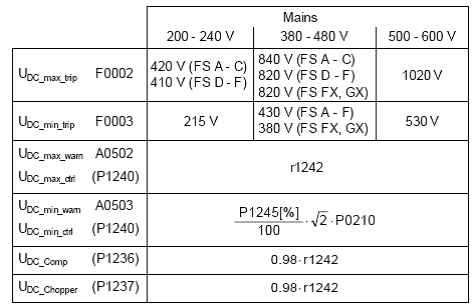
圖1 MM4變頻器直流母線電壓檢測
如圖在直流母線電壓大于r1242的值時,如果Vdmax控制器已使能會出現A0911報警,如果Vdmax控制器沒有使能,會出現A0502報警。
r1242的值與參數P1254的設置有關,當P1254=0時: ![]()
而當P1254=1時,變頻器在啟動過程中會根據進線電壓自動計算確定r1242的值。
如果P1254=1,在現場使用中可能遇到這種情況:在啟動變頻器時,電網的電壓比較低(例如電網上接有大的負載時),此時 變頻器根據當前進線電壓計算出一個較低的閾值(r1242),而在正常運行中,電網電壓恢復正常電壓值(例如電網上大的負載停止工作),此時直流母線電壓可能會超過r1242的閾值,出現報警A0911或A0502。而此時,如果測量進線電壓或直流母線電壓均正常。
在這種情況下可以設置P1254=0,禁止變頻器電壓的自動檢測,可以解決此類問題。
用戶可以使用以下命令通過 USS 建立 JOG 操作:
1) P0700 必須設置為 4 或 5 (分別通過 RS232 或 RS485 進行 USS 通訊 )
2) 變頻器必須停止并準備運行。
要完成此操作,發送 PZD 命令 047E 0000 (十六進制)
= (0000 0100 0111 1110 0000 0000 0000 0000).
變頻器需使用 FA31 0000 (十六進制) 進行應答
= (1111 1010 0011 0001 0000 0000 0000 0000)
3) 要右向點動 (JOG),發送命令 057E 0000 (十六進制)
= (0000 0101 0111 1110 0000 0000 0000 0000)
4) 要左向點動 (JOG),發送命令 067E 0000 (十六進制)
= (0000 0110 0111 1110 0000 0000 0000 0000)
5) 要停止,則發送命令 047E 0000 (十六進制)
= (0000 0100 0111 1110 0000 0000 0000 0000)
使用控制位 8 和 9 可以改變點動 (JOG) 方向但并不會停止運行。
例如:057E 0000 命令后使用 067E 0000,變頻器無需停機就可將點動方向從右向改變到左向。
MM430和MM440中FX,GX尺寸的變頻器,在配置DP模板使用外部24V供電,在變頻器主電源斷電的情況下,變頻器出現F0022,A0522故障和報警,如何處理?
回答:
通過DP模板上的端子給變頻器提供24V電源時,對于尺寸為FX,GX的變頻器,在變頻器主電源斷電的情況下可能會出現A0522、F0022!這樣在變頻器主電源恢復的情況下也不能直接啟動運行變頻器,必須得先確認故障然后再運行變頻器!
解決辦法如下:
將通過DP模板上的端子提供外部24V供電,改為通過端子X9上的1,2號端子提供外部24V供電即可解決這個問題。
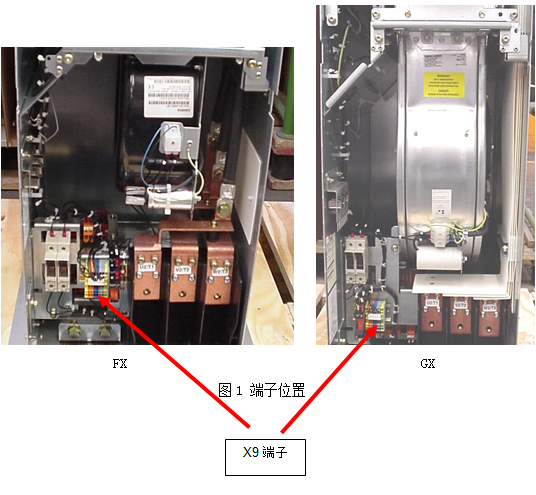

圖1:設置參數P0724的濾波邏輯示意圖
方法1
利用自由功能塊(FFB)的定時器實現。將數字量輸入DIN1經過一個定時器延時,然后,在應用中利用定時器1的輸出信號r2852取代r0722就可以了。
如圖2所示,假設原來的應用是用數字量輸入DIN1(即5號端子)作為變頻器的ON/OFF1起停命令,參數設置如下:
P0700.0 = 2, P0701.0 = 1
經過消抖設置后,參數設置變成:
P0700.0 = 2, P0701.0 = 99
P2800 = 1, //使能自由功能塊
P2802.0 = 1, //使能定時器
P2849 = 722.0, P2850 = 0.5, P2851 = 1, //定時器0.5s延時
P0840.0 = 2852.0 // ON/OFF1
這樣設置后,變頻器運行后,在DIN1上出現持續時間小于0.5s的低電平干擾,不會導致變頻器誤停機。
如果修改上述設置,讓P2851 = 2,可以濾除時間相同的正、負脈沖。
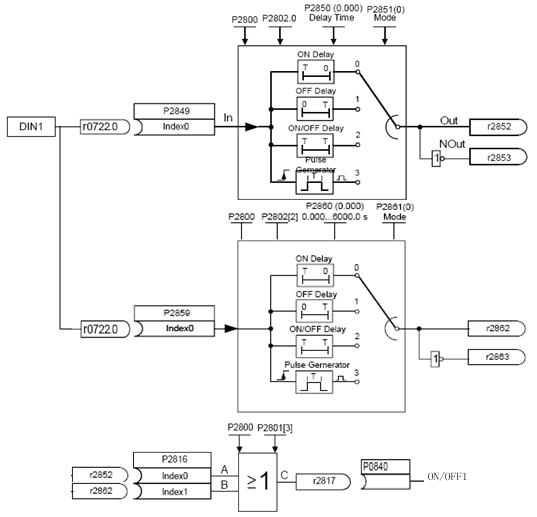
圖3:定時器和“或"門實現消抖設置
P0748參數是一個可以進行位設置的參數,低3位bit00bit01bit02分別對應三個數字量輸出(繼電器輸出)。修改P0748參數可以使變頻器的數字量輸出繼電器的邏輯反相。
參數七段顯示得結構,各位設置的定義如下圖所示:
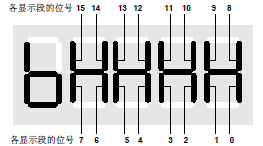
以數字量輸出1舉例(對于MM440MM430,是端子18、19和20;對于MM420,是端子10和11 ),變頻器的數字量輸出1默認設置表示故障信號,默認的動作邏輯是:一上電*常開節點閉合,有故障斷開。如果要求的邏輯是*斷開,有故障閉合的話,就需要設置參數P0748,具體方法如下:
找到參數P0748,如圖1所示,
圖1
按“![]() "鍵確認,如圖2所示,
"鍵確認,如圖2所示,
區分通信故障和信息錯誤:
在診斷參數r2026-r2031中,可區分通信故障還是信息中的錯誤。如果這些值中只有一個在增加,這說明通信是好的,但信息本身中有錯誤。如果幾個或所有值都同時增加,這說明存在由EMC問題引起的通信故障。
各個參數的重要性在相應MICROMASTER類型的手冊“MICROMASTER 4xx 參數列表"中有詳細描述。
識別干擾噪聲:
診斷參數r2024-r2025表示由干擾噪聲 引起的通信故障。如果轉換器成功接收到信息,r2024就開始計數,參數r2025表示被拒絕的信息數量。在正常工作的系統中r2024至少應該比r2025的增加速度快五十倍。如果r2025增加的比r2024快,很可能是信息結構不正確或信息被破壞(例如通過干擾噪聲)。請參照條目! !“如何在S7-200和MICROMASTER 4之間通過端口0建立帶EMC和過壓保護的通信連接?"來檢查物理總線。
識別EMC或 偏壓問題:
診斷參數r2026-r2029表示由EMC或偏壓問題引起的通信故障。如果所有參數(r2026至r2029)都增加,就表明有EMC或偏壓問題。如果偏壓不足,網絡就會對干擾噪聲非常敏感。網絡上的峰值能超出偏壓并作為邏輯“0"被接收,而這通常表明信息的開始。可以通過錯誤的啟動位錯誤(由r2029計數)的增加來識別它。如何使用示波器來發現錯誤的偏壓在條目! !“如何使用示波器檢測在RS485接口上的錯誤偏壓?"中有描述。
