 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網

6ES7 212-1AE40-0XB0現貨供應
6ES7 212-1AE40-0XB0
西門子觸摸屏結合西門子PLC在閉環控制的變頻節能系統中的應用是一種自動控制的趨勢。觸摸屏和PLC在閉環控制的變頻節能系統中的使用,可以讓操作者在觸摸屏中直接設定目標值(壓力及溫度等),通過PLC與實際值(傳感器的測量值)進行比較運算,直接向變頻節能系統發出運算指令(模擬信號),調節變頻器的輸出頻率。并可實時控到被控系統實際值的大小及變頻器內的多個參數,實現報、記錄等功能
西門子PLC在高壓固態軟起動器中的應用 摘要:先介紹了軟起動的狀況以及高壓固態軟起動工作原理。通過使用西門子S7-200可編程邏輯控制編程實現不同起動方式下的三相可控硅觸發角給定模擬信號,利用市場上成熟的三相晶閘管移相觸發模塊接收PLC給定的模擬信號后按照相對應的觸發角輸出六路脈沖列,然后通過光纖技術傳送脈沖信號觸發可控硅閥主件從而實現電機軟啟動效果,同時也很好的解決了高壓隔離問題,本文還重點介紹到可控硅觸發取能問題。 關鍵詞:軟啟動;PLC;晶閘管移相觸發;光纖觸發 隨著工業的快速增長,三相交流異步電機因其結構簡單、運行可靠、價格低廉、體積較小、機械性能好、運行維護方便等優點而被廣泛采用。據統計,三相交流異步電機耗電量占全發電量的30%以上。然而, 電動機的起動特性卻一直不理想。*,電動機起動過程中的起動電流一般為額定電流3~7倍,可達電動機額定電流的8倍。這樣大的電流不僅加重了進線、供電電網以及接在電動機前面的開關電器的負荷,而且同時出現的巨大轉矩沖擊又會使電動機發生猛烈的沖振,并且也給用作動力傳輸的輔助設備和做功的機械設備帶來不可避免的機械沖擊口 。
三相高壓交流異步電機的起動主要是通過在電源和電動機之間串聯限流器件來實現降壓起動,以確保起動過程中的性。起動方式主要有有級降壓起動和無極軟起動兩類,前者對電壓的調節是分檔的,例如串電阻、串電抗、Y-△等起動;后者對電壓的調節是連續的,例如串反向晶閘管、串開關變壓器等起動。此類軟起動通常也稱為固態軟起動,在實際設計過程中晶閘管的觸發角控制導通問題是決定此類軟起動的成敗關鍵所在。本文將利用西門子S7-200可編程邏輯控制器的靈活、實用、可靠性高、抗干擾能力強、編程簡單、功能模塊化、使用方便等特點配合專門的三相移相觸發板解決軟起過程中晶閘管的觸發角控制導通問題,以及應用光纖觸發技術解決高壓隔離問題,從而有效實現軟起動的斜坡升壓軟起動、斜坡恒流軟起動、脈沖沖擊起動等起動方式,另外PLC還將實現系統模擬量采集、從站通訊、人機界面互動、邏輯控制等功能。 2.高壓固態軟起動工作原理
PLC控制器本身的硬件采用積木式結構,有板,數字I/O模板,模擬I/O模板,還有特殊的模板,條形碼識別模板等模塊,用戶可以根據需要采用在板上擴展或者利用總線技術配備遠程I/O從站的方法來得到想要的I/O數量
手動/自動切換
FB58的手動/自動切換是通過參數MAN_ON來完成的,在MAN_ON為True的時候,PID處在手動工作狀態,此時,手動值通過參數MAN給出。

圖8 控制輸出
默認情況下,LMN_HLM和LMN_LLM分別是100.0和0.0,從上圖中可以看出,手動值的有效數值范圍也應該是0.0~100.0。
在參數MAN_ON為False的情況下,PID投入運行,控制回路處于自動工作狀態。
為了降低手動/自動切換過程中擾動,算法通過如下措施來實現無擾切換:
- 在自動的狀態下,比例和積分的運算結果之和會寫入到單元MAN中,這樣在由自動切換到手動的過程中不會引起控制輸出波動;
- 在手動的狀態下,積分項的輸出等于MAN的值減去比例項的值(偏差ER*增益Gain),而在自動狀態中,積分項是一個累計的結果,這樣在切換到自動狀態時積分項不會有太大的突變。
從上面的分析可以知道,FB58已經集成了相應的無擾切換的功能,不需要編寫額外的程序來實現。
2.5 保存和重新裝載參數
保存和重新裝載控制器參數是FB58中的新功能,主要用來實現在多套參數之間的切換。
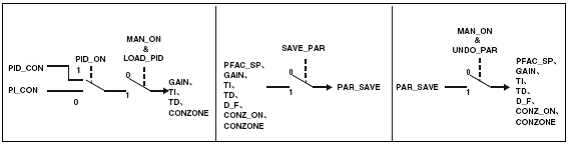
圖9 控制參數保存和重新裝載
從上圖中可以看出,控制參數的處理有三種方式:
(1)從PID_CON/PI_CON中裝載
要實現此裝載,必須滿足如下幾種條件:
手動控制狀態(MAN_ON=True);
PID_CON.GAIN或者PI_CON.GAIN不為0;
LOAD_PID為1
如果參數PID_ON為1,則從PID_CON中裝載如下參數:
GAIN、TI、TD,并計算CONZONE=250.0/GAIN
如果參數PID_ON為0,則從PI_CON中裝載如下參數:
GAIN、TI、TD,并計算CONZONE=250.0/GAIN。特殊地,此時會關閉控制帶功能,即設置CON_ZONE參數為0,并讓微分參數TD設置為0.0。
裝載完成之后,參數LOAD_PID會自動復位。
值得注意的是,如果PID_CON中保存的增益參數PID_CON.GAIN為0,則自動會修改PID_ON為0,并轉而從PI_CON中獲取參數。
注:PID_CON/PI_CON中的參數來自于自整定過程。
(2)保存參數
保存參數可以在任何工作狀態下進行,只需設置參數SAVE_PAR為1即可。可以將如下參數保存找PAR_SAVE結構體中:
PFAC_SP、GAIN、TI、TD、D_F、CONZ_ON、CON_ZONE
在保存結束之后,參數位SAVE_PAR會自動復位。
(3)重新裝載參數
重新裝載是“保存參數"的逆過程,但其執行是需要條件的:
手動控制狀態(MAN_ON=True);
PAR_SAVE.GAIN不為0;
參數UNDO_PAR為1。
在重新裝載完成之后,參數UNDO_PAR會自動復位。
3 高級功能
3.1 控制帶
溫度控制回路是一個有明顯滯后特性的對象,這給實際的調節過程帶來了很多的問題,顯著的困難就是在過程值偏離設定值較大時,調節過程過于緩慢,而在接近設定值時容易出現較大的超調。
從上述的兩個問題出發,PID應該滿足這樣的功能:
- 在偏差超過一定的范圍時,PID輸出或者小的調節量,讓溫度值快速回到一個小的范圍中,以縮短回路的調節時間;
- 在設定值附近時,越靠近調節量變化越小,以防止超調。
為此,FB58提供了一個“控制帶(Control Zone)"功能,其工作原理是這樣的:
- 當過程值PV大于設定值SP_INT,且偏差的值超過CON_ZONE,則以輸出下限LMN_LLM作為輸出值;
- 當過程值PV小于設定值SP_INT,且偏差的值超過CON_ZONE,則以輸出上限LMN_HLM作為輸出值;
- 如果偏差的值小于CON_ZONE,則以實際PID的計算結果作為輸出值。

圖10 控制帶(正作用情況下,即GAIN>0.0)
默認參數中LMN_LLM是0.0,LMN_HLM是100.0,控制帶使能位CONZ_ON是False,控制帶范圍是100.0。
如上圖所示的控制帶解決了在偏差較大時PID調節過于緩慢的問題,但在控制帶范圍中要避免因大滯后導致的超調,需要弱化PID的輸出,要實現這個功能,可以通過降低比例參數和增加微分作用。在同樣的偏差情況下,比例增益越小,PID輸出變化越緩慢。微分作用簡單來看就是通過偏差的變化量來調節,在接近設定值的過程中,溫度變化速度在逐步變慢,此時的微分作用可以起到弱化控制輸出的功能,進而達到減少超調的目的。因此,推薦控制帶在有微分作用的前提下使用。參數裝載的過程也體現了這一點:
- 如果是裝載PI_CON下的參數,因為沒有微分功能,所以會設置CONZ_ON為False。
在使用過程中,控制帶參數CON_ZONE應該始終設置為一個大于等于0.0的值,否則會導致PID運算結果永遠不會被執行的故障現象